Universal differential equation (UDE)
The UDE refers to an approach to embed the machine learning into differential equations. The resulting UDE has some parts of the equation replaced by universal approximators i.e., neural network (NN). The UDE model approach allows us to approximate a wide, if not infinite, variety of functional relationships. As an example, I will test how well the UDE model approach will approximate a sub-exponential growth model , which is challenging to fit if we use an exponential growth model.
I am using Julia for the UDE approach as it appeared that the Julia is the most advanced in this regard.
# SciML (Scientific Machine Learning) Tools using OrdinaryDiffEq , SciMLSensitivity using Optimization , OptimizationOptimisers , OptimizationOptimJL # Standard Libraries using LinearAlgebra , Statistics # External Libraries using ComponentArrays , Lux , Zygote , Plots , StableRNGs gr ()# Set a random seed for reproducible behaviour = StableRNG (1111 )
StableRNGs.LehmerRNG(state=0x000000000000000000000000000008af)
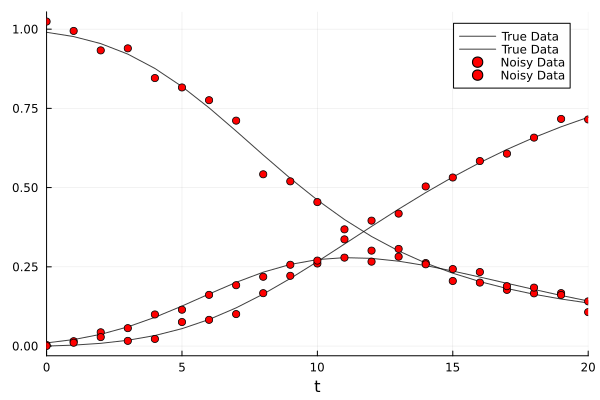
Data generation
The SIR model with a sub-exponential growth is used.
function sir_subexp! (du, u, p, t)= p 1 ] = - β* u[1 ]* u[2 ]^ α2 ] = + β* u[1 ]* u[2 ]^ α - γ* u[2 ]3 ] = + γ* u[2 ]end
sir_subexp! (generic function with 1 method)
# Define the experimental parameter = (0.0 , 20.0 );# u0 = 5.0f0 * rand(rng, 2) = [0.99 , 0.01 , 0.0 ];= [0.8 , 0.4 , 0.2 ];= ODEProblem (sir_subexp!, u0, tspan, p_);= solve (prob, Tsit5 (), abstol = 1e-12 , reltol = 1e-12 , saveat = 1.0 );# Add noise in terms of the mean = Array (solution);= solution.t;= mean (X, dims= 2 ); = 5e-2 ;= X .+ (noise_magnitude * xbar) .* randn (rng, eltype (X), size (X));plot (solution, alpha = 0.75 , color = : black, label = ["True Data" nothing ]);scatter! (t, transpose (Xn), color = : red, label = ["Noisy Data" nothing ])
UDE model
# Let's define our Universal Differential eqution rbf (x) = exp .(- (x .^ 2 ));# Multilayer FeedForward const U = Lux.Chain (Lux.Dense (3 , 5 , rbf), Lux.Dense (5 , 5 , rbf), Dense (5 , 5 , rbf), Lux.Dense (5 , 1 ))
Chain(
layer_1 = Dense(3 => 5, rbf), # 20 parameters
layer_2 = Dense(5 => 5, rbf), # 30 parameters
layer_3 = Dense(5 => 5, rbf), # 30 parameters
layer_4 = Dense(5 => 1), # 6 parameters
) # Total: 86 parameters,
# plus 0 states.
# Get the initial parameters and state variables of the model = Lux.setup (rng, U)
((layer_1 = (weight = Float32[-0.11597705 -0.5499123 0.10071843; -0.20088743 0.5602648 0.2718303; … ; -0.22440201 -0.57859105 0.7904316; -0.4619576 -0.62989676 0.18545352], bias = Float32[0.0; 0.0; … ; 0.0; 0.0;;]), layer_2 = (weight = Float32[-0.043933477 -0.21508422 … 0.55779475 0.5849693; 0.0011237671 0.006483868 … 0.27549765 -0.2874395; … ; 0.5079049 -0.36002874 … 0.41297784 -0.5777891; -0.5179172 -0.60432595 … -0.18625909 0.06577149], bias = Float32[0.0; 0.0; … ; 0.0; 0.0;;]), layer_3 = (weight = Float32[0.21934992 0.20916325 … -0.357856 -0.27426103; 0.59777355 -0.04514681 … 0.22668682 0.73459923; … ; 0.36797842 0.13955377 … 0.28912562 0.20840885; -0.33154675 0.035615936 … 0.011346816 -0.13401343], bias = Float32[0.0; 0.0; … ; 0.0; 0.0;;]), layer_4 = (weight = Float32[-0.49593353 -0.68478346 … -0.4632702 -0.1476636], bias = Float32[0.0;;])), (layer_1 = NamedTuple(), layer_2 = NamedTuple(), layer_3 = NamedTuple(), layer_4 = NamedTuple()))
(layer_1 = NamedTuple(), layer_2 = NamedTuple(), layer_3 = NamedTuple(), layer_4 = NamedTuple())
# Define the hybrid model function ude_dynamics! (du, u, p, t, p_true)= U (u, p, _st)[1 ] # Network prediction 1 ] = dS = - û[1 ]2 ] = dI = + û[1 ] - p_true[3 ]* u[2 ] 3 ] = dR = + p_true[3 ]* u[2 ] end
ude_dynamics! (generic function with 1 method)
# Closure with the known parameter nn_dynamics! (du, u, p, t) = ude_dynamics! (du, u, p, t, p_)
nn_dynamics! (generic function with 1 method)
# Define the problem = ODEProblem (nn_dynamics!, Xn[: , 1 ], tspan, p)
ODEProblem with uType Vector{Float64} and tType Float64. In-place: true
timespan: (0.0, 20.0)
u0: 3-element Vector{Float64}:
1.0239505612968622
0.0034985090690380412
0.00031492340046744696
# I don't understand the details of the algorithm # sensealg=QuadratureAdjoint(autojacvec=ReverseDiffVJP(true)) # I just adopted what's provided in the web page: # https://docs.sciml.ai/Overview/stable/showcase/missing_physics/ function predict (θ, X = Xn[: , 1 ], T = t)= remake (prob_nn, u0 = X, tspan = (T[1 ], T[end ]), p = θ)Array (solve (_prob, Tsit5 (), saveat = T,= 1e-6 , reltol = 1e-6 ,= QuadratureAdjoint (autojacvec= ReverseDiffVJP (true ))))end
predict (generic function with 3 methods)
function loss (θ)= predict (θ)mean (abs2, Xn .- Xhat)end
loss (generic function with 1 method)
= Float64 [];= function (p, l)push! (losses, l)if length (losses) % 50 == 0 println ("Current loss after $ (length (losses)) iterations: $ (losses[end ])" )end return false end
#125 (generic function with 1 method)
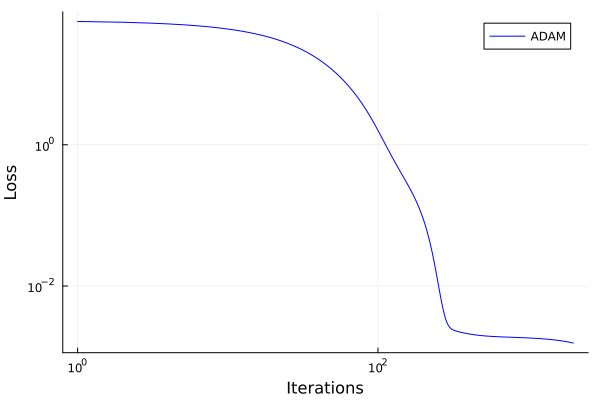
= Optimization.AutoZygote ();= Optimization.OptimizationFunction ((x, p) -> loss (x), adtype);= Optimization.OptimizationProblem (optf, ComponentVector {Float64} (p));= 2000 = Optimization.solve (optprob, ADAM (), callback = callback, maxiters = mxiter);println ("Training loss after $ (length (losses)) iterations: $ (losses[end ])" )
Training loss after 2001 iterations: 0.0015564208691683874
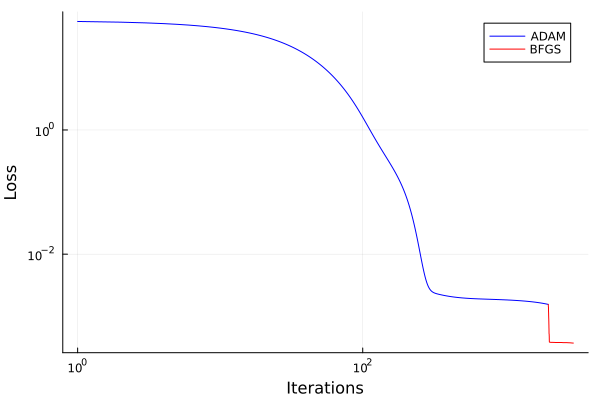
# You can optimize further by using LBFGS = Optimization.OptimizationProblem (optf, res1.u)
OptimizationProblem. In-place: true
u0: ComponentVector{Float64}(layer_1 = (weight = [-0.05170182389621984 -0.6044817578839353 0.030221881763510722; -0.32123561819724095 0.6510350091471692 0.44802414729182577; … ; -0.29710021515609997 -0.5198718000241755 0.8494439396600794; -0.5240838499417148 -0.5805885464625195 0.2207764494848388], bias = [0.07034258756689579; -0.1248750018606046; … ; -0.10460911230943246; -0.09231330051875483;;]), layer_2 = (weight = [-0.16444552836729504 -0.39149348409521373 … 0.4595876886836963 0.48596336484497255; 0.06110486638492416 0.09809356179876788 … 0.33257093321228715 -0.23929486432898225; … ; 0.44222617028480327 -0.07489082170130384 … 0.38613240122653225 -0.6098094519525386; -0.4255467375078114 -0.39126782596548754 … -0.07050700982314294 0.183500531584539], bias = [-0.10242371127901419; 0.05522672750843921; … ; -0.06460784045609771; 0.08515934187149939;;]), layer_3 = (weight = [0.30753421402862036 0.2947114335480522 … -0.26966507778144233 -0.19068344291102465; 0.6803575575897453 0.0350253144116066 … 0.3095389929942777 0.8122600471146871; … ; 0.4338542747333688 0.20165221719158863 … 0.35259992082403724 0.2701023387838381; -0.2070809282199827 0.1890743367589869 … 0.1659803847569096 -0.0012012794338499672], bias = [0.08539245136971987; 0.08006728472152563; … ; 0.06194248786256519; 0.15306636356417658;;]), layer_4 = (weight = [-0.42084525587118515 -0.6144846254382511 … -0.40340199958868356 -0.06553529479212013], bias = [0.09174711461704013;;]))
= Optimization.solve (optprob2, Optim.LBFGS (), callback = callback, maxiters = 1000 );println ("Final training loss after $ (length (losses)) iterations: $ (losses[end ])" )
Final training loss after 3002 iterations: 0.00037095070511105146
# Rename the best candidate = res2.u
ComponentVector{Float64}(layer_1 = (weight = [0.18588559475980856 -0.678836961079842 0.003164511566198509; -0.2117593049546201 0.7659777764210745 0.5001880949174726; … ; -0.12793809908258996 -0.5806165465015546 0.7359889411458274; -0.5987978703086538 -0.8542736922318693 0.22071269547796915], bias = [0.20283880857556238; 0.1442364184846448; … ; -0.10951065483152145; -0.43136285105428973;;]), layer_2 = (weight = [-0.7722740902742339 -1.1539959612185595 … -0.2557276161227372 0.04069177034071063; 0.11613000554442242 -0.06879626497651166 … 0.49503733065196687 -0.20521706786070337; … ; 0.49449245622560034 0.17333857621023685 … 0.3021120793343474 -0.7328812254592773; -0.2225923998099525 -0.1546676318277597 … 0.38305691443718165 0.48987085385328843], bias = [-0.7211379554471269; 0.18024471356943225; … ; -0.06082478805131034; 0.35625527871182344;;]), layer_3 = (weight = [0.06379174538587522 0.13743725900849454 … -0.37275930238632443 -0.4224270345491679; 1.0145108036936996 0.5041281988482341 … 0.7904247027437314 0.9963675316648448; … ; 0.42914689744537293 0.2244122549609806 … 0.38639622079002267 0.24704090971935938; -0.2838037009222233 0.13375316701238169 … 0.12509351575197344 -0.08653639834262729], bias = [-0.1263271345517243; 0.44502442954219273; … ; 0.07338220202701212; 0.0804054739454783;;]), layer_4 = (weight = [-0.5832026087107504 -0.34311500443215825 … -0.3606462665796045 -0.2121086546094451], bias = [0.3482487547293952;;]))
# Plot the losses = plot (1 : mxiter, losses[1 : mxiter], yaxis = : log10, xaxis = : log10,= "Iterations" , ylabel = "Loss" , label = "ADAM" , color = : blue)plot! ((mxiter+ 1 ): length (losses), losses[(mxiter+ 1 ): end ], yaxis = : log10, xaxis = : log10,= "Iterations" , ylabel = "Loss" , label = "BFGS" , color = : red)## Analysis of the trained network # Plot the data and the approximation = first (solution.t): (mean (diff (solution.t)) / 2 ): last (solution.t)= predict (p_trained, Xn[: , 1 ], ts)
3×41 Matrix{Float64}:
1.02395 1.00815 0.992781 … 0.150512 0.141294 0.131538
0.00349851 0.0181957 0.0310887 0.16279 0.156074 0.15051
0.000314923 0.00141772 0.0038941 0.714463 0.730397 0.745716
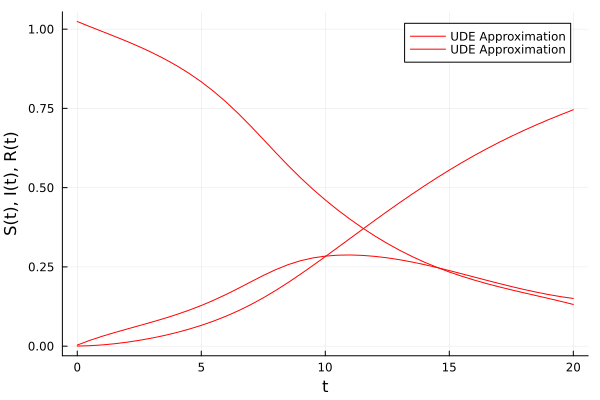
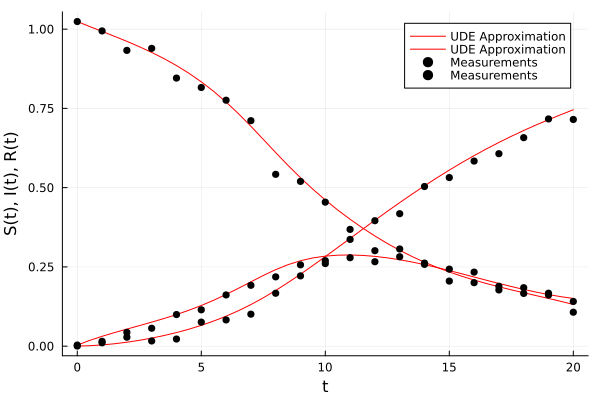
# Trained on noisy data vs real solution = plot (ts, transpose (Xhat), xlabel = "t" , = "S(t), I(t), R(t)" , color = : red,= ["UDE Approximation" nothing ])scatter! (solution.t, transpose (Xn), color = : black, label = ["Measurements" nothing ])# Ideal unknown interactions of the predictor # Ybar = [-p_[2] * (Xhat[1, :] .* Xhat[2, :])'; p_[3] * (Xhat[1, :] .* Xhat[2, :])'] # Ybar = [p_[2] .* Xhat[1,:] .* (Xhat[2,:].^p_[1])] = transpose ([p_[2 ] * Xhat[1 ,i] * (Xhat[2 ,i].^ p_[1 ]) for i ∈ 1 : 41 , j ∈ 1 : 1 ])
1×41 transpose(::Matrix{Float64}) with eltype Float64:
0.00444064 0.0163516 0.024717 … 0.0140907 0.0127893 0.0115655
# Neural network guess = U (Xhat, p_trained, st)[1 ]
1×41 Matrix{Float64}:
0.032401 0.0309925 0.0306477 0.031214 … 0.0180941 0.0188726 0.02026
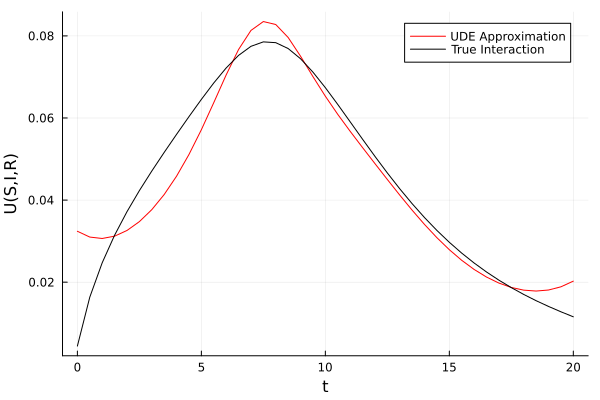
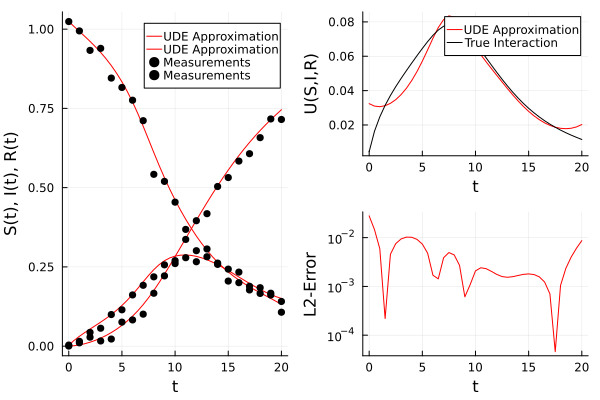
= plot (ts, transpose (Yhat), xlabel = "t" , = "U(S,I,R)" , color = : red,= ["UDE Approximation" nothing ]);plot! (ts, transpose (Ybar), color = : black, label = ["True Interaction" nothing ])# Plot the error = plot (ts, norm .(eachcol (Ybar - Yhat)), yaxis = : log, xlabel = "t" ,= "L2-Error" , label = nothing , color = : red);= plot (pl_reconstruction, pl_reconstruction_error, layout = (2 , 1 ));= plot (pl_trajectory, pl_missing)